 平台热线
平台热线



OLP川崎机器人的离线办法—Kawasaki川崎机器人
很多小伙伴买了川崎机器人但是呢不知道川崎的离线方式,那么接下来我们来盘点一下川崎的连线方法首安装川崎机器人的RCS
1,点开软件的安装文件包,以PDPS14.1.1为例,安装如下图示两个文件,安装路径选择默认路径即可,如果软件是其他版本比如PDPS12.1或13.0,那么安装其他对应的程序即可。

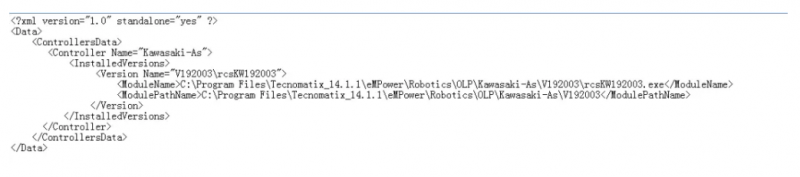
2、打开配置文件中的 rrs 文件,右键编辑打开,在 PDPS 软件中找到
rcsKW192003.exe 对应的安装路径,并将其编辑到 rrs 文件中存放到安装路
径 C:\Program Files\Tecnomatix_14.1.1\eMPower\Robotics\OLP;
3、将配置文件中的“.kwinfo”控制器许可文件拷贝到如下路径;
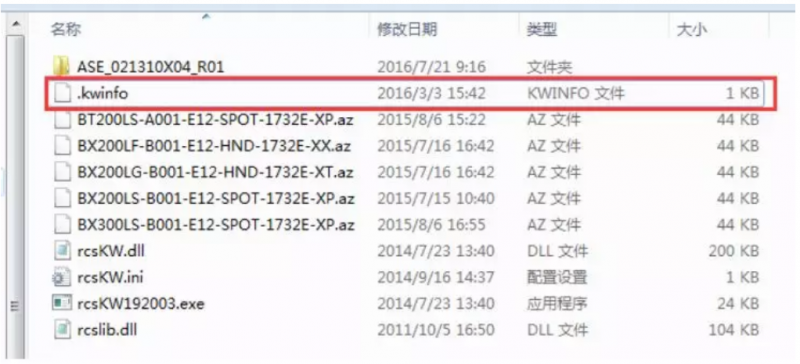
4、打开“离线程序 RCS 控制器”文件夹,找到川崎机器人需要出离线对应机器人型号,将其中的“BX200LS-B001-E12-SPOT-1732E-XP.az”拷贝到
上图文件夹中;
5、重启电脑,用Precess Simulate打开要出离线的项目,选中机器人。
连接控制器,设置参数,下载程序。
6、 在 PS 中选择机器人 Robot properties,在对话框 Manipulator 中选
择对应的机器人类型,如图中选择的机器人型号。
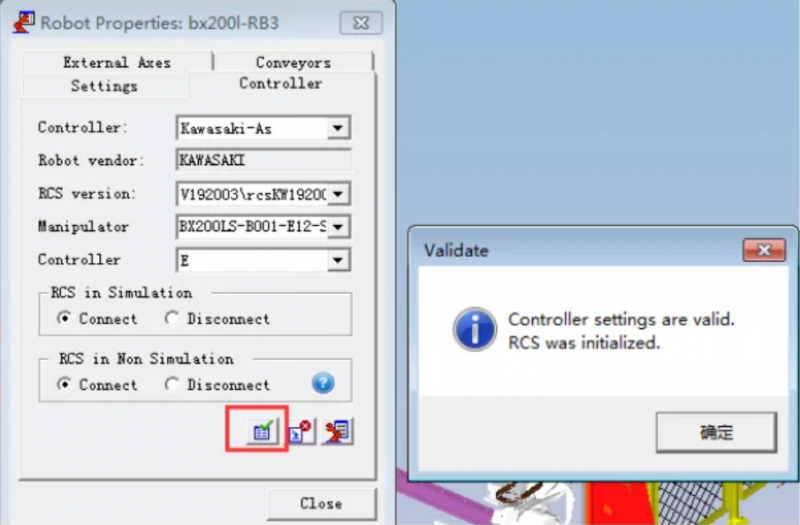
7、RCS in simulation 对话框中选择 connect,点击图中所示进行连接,连接
成功显示如下图;
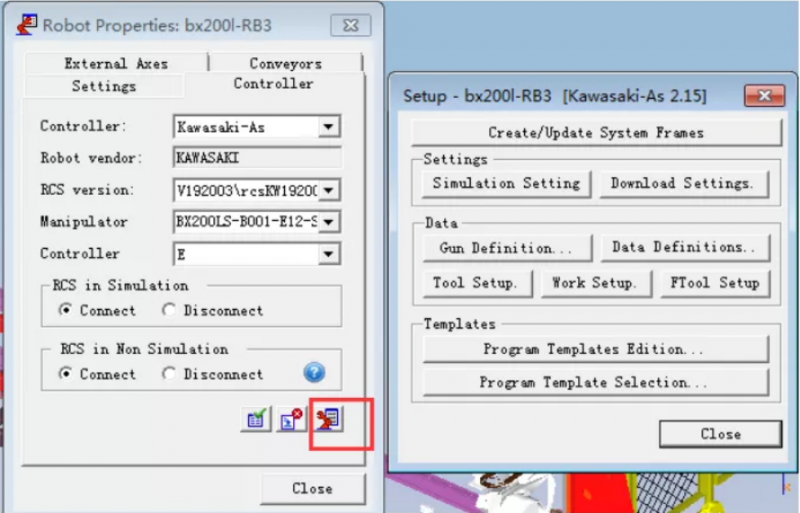
8、点击 Robot setup 进行焊钳,用户坐标,工具坐标的设置。
和其他品牌出离线设置参数方法类似,设置Uframe、Ttool、Gun Definition、Download Setting、Program Template Selection等设置完之后打开Attach功能走一遍路径,右键点击Download下载即可。
未来的工业将会逐渐的发展,同时也将代替人工,那么我们面对这样的改革,只有学习新的专业技术才不会被淘汰、